Getting started with xygine - Part 6
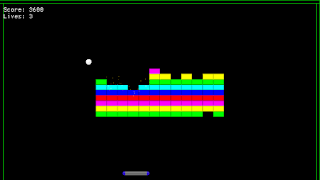
Pop & Sparkle - That Magic Touch In the final part of the tutorial let's look at xygine's Director class, and see how it can be used to add some of the finer details to the game with the AudioEmitter and ParticleEmitter components. The Director The Director class in xygine differs slightly from the other ECS based classes, in that while it is a member of the Scene , it doesn't interact directly with it. The Director class instead monitors the Scene via the event queue and MessageBus , and dispatches commands or creates new entities based on what it has observed - hence the title Director . The class itself is actually an abstract one - to use it we'll need to create our own class which inherits it. In this case we will use the Director to observe Block s being destroyed by using the Director 's message handler, and dispatch entities with an AudioEmitter and ParticleEmitter components attached to create a special effect. This class we'...